下一代智能汽车会是什么样的?将有哪些清晰可见的突破?
在聊智能汽车新技术展望之前,我们可以看看目前的现状。去年开始,汽车领域的热度逐渐被新能源霸屏,智能汽车一大卖点:自动驾驶的热度弱了很多,从车企到资本市场,大谈L4,L5自动驾驶的也少了很多,当大家深切体会到自动驾驶的实现难度之后一切都趋于理性。
一方面自动驾驶满足最新ISO26262功能安全标准(保护人身安全)的难度似乎就是“不可能”事件。在对功能安全风险等级进行评估的时候我们主要从三个维度来进行分析,一个是这个系统失效是否会导致严重的人身伤害?另外一个是这个系统的功能是否会在各种场景下都使用?最后一个是当这个系统失效的时候驾驶员是否还对车辆可控?
用这三个标尺来衡量自动驾驶:自动驾驶失效会造成最严重的人身伤害;无限制的L5自动驾驶自然会被使用在所有的驾驶场景;最后对于L5自动驾驶来说,真谛就是方向盘刹车油门变得不再必须,这时候又怎么可能指望在系统失效的时候驾驶员对车辆还及时可控。
这三个衡量标准直接导致L4/L5自动驾驶需要满足功能安全最高等级ASIL D的要求,而ASIL D是主机厂都想尽量避免的ASIL等级。从A到D,研发成本指数级上升:
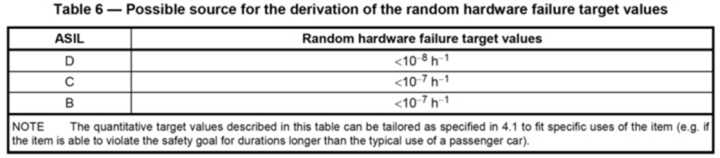
比如所有传感器都要满足ASIL D要求,不同等级之间最大的区别是在失效率上,ASIL D的硬件要求随机出错的概率是ASIL C的1/10,具体的概率如下表显示,可以用FIT (failure in time)来表示,1 FIT所表示的是运行10亿小时出错一次,ASIL D的要求是 10 FIT,也就是运行100亿小时出错一次。这等同于136,892辆车运行一年只有一辆出错一次。

而目前大部分汽车上使用的零部件能达到ASIL B要求的都不多。如果达不到ASIL D,就需要用多个零部件来做同样功能进行冗余设计。比如速度传感器,如果一个传感器只能达到ASIL B的要求,那么ASIL D就需要搭配两个ASIL B的传感器。同理如果传感器只能满足ASIL A的要求,那么就需要至少三个同类传感器实现A+A+A=C,这对于车企来说就是成本上的灾难,也代表着在技术上需要融合多种传感器算法,这是目前功能安全很难满足要求的主要原因。
另一个目前自动驾驶面临的问题则是整个平台算力和能耗的瓶颈。要满足自动驾驶需要不同的传感器来取长补短,比如雷达适合各种气候条件下使用,也适合速度和距离的判断。但是分辨率却很低,也不适合物品类型的识别,这部分需要激光雷达来补充,同时还需要摄像头来进行比如交通标识和车道的图像识别。下表所展示得是雷达,激光雷达以及摄像头之间的优势和劣势对比。

 表格来自:https://www.wevolver.com/article/a.primer.on.lidar.for.autonomous.vehicles
表格来自:https://www.wevolver.com/article/a.primer.on.lidar.for.autonomous.vehicles
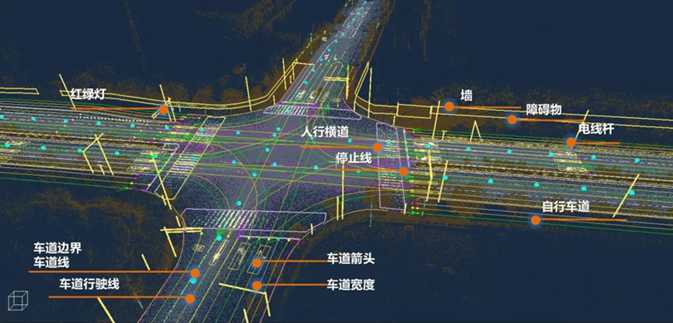
自动驾驶中最耗费算力的就是机器视觉感知和多种传感器信息融合这部分,下图是激光雷达感知并构建的车辆周围3D环境。不算激光雷达的使用,仅仅是今天市面上搭配了摄像头和雷达的L2辅助驾驶系统,就会在30秒的周期内生成超过6GB的数据,如果添加激光雷达和其他冗余的传感器那么这个数据量还会翻倍增加,对这些数据进行实时处理,直接挑战的是ADAS控制器的算力以及算力对应的能耗。


一些在研的自动驾驶原型车项目,为了算力直接搭载了体积巨大的工控机,同时意味着几千瓦的能耗。要知道车用48V电机的功率才有几千瓦,如果按照这个能耗计算,整个自动驾驶系统对于电动车来说会意味着1/10的续航里程下降。下图是斯坦福大学搭载在奥迪TT上的自动驾驶原型机和控制附件,铺满了整个后备箱。

 图片来自:https://www.wired.com/story/self-driving-cars-power-consumption-nvidia-chip/
图片来自:https://www.wired.com/story/self-driving-cars-power-consumption-nvidia-chip/
面对上面的难点,未来的智能汽车会是什么样?那就要看车企们是如何围绕这些难点来进行集中攻关的。
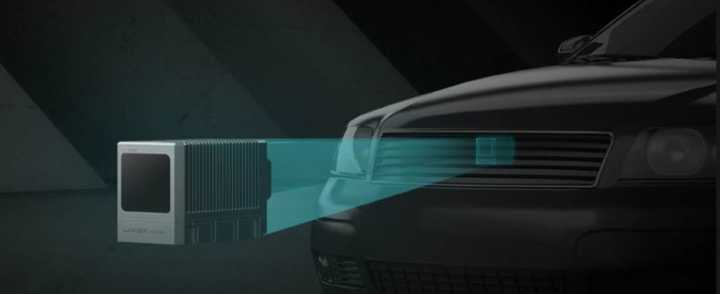
针对功能安全的短板,现在最直接的解决方案是布置冗余的传感器,除了使用更多的传统摄像头和雷达,最新的趋势将是搭配激光雷达和高精地图。激光雷达比起摄像头可以构建更真实的3D环境,而比起雷达又具有更准
确的物体识别能力。随着更多的供应商开始参与到量产化研发,激光雷达的成本也在快速降低。比如大疆投资的Livox去年推出的Livox Mid-40,只要3999,相对动辄几万几十万的激光雷达,已经是白菜价,虽然Field of View只有38.4度。

今年CES展上,Livox更是展出了针对自动驾驶系统的Horizon产品,水平视场(HFOV)为81.7°,可以轻松覆盖10米外的4条车道,使用五个Horizon传感器组合即可实现360°覆盖,而总成本仅为64线机械激光雷达的5%(https://zhuanlan.zhihu.com/p/101341002)
 图片来自:https://zhuanlan.zhihu.com/p/101341002
图片来自:https://zhuanlan.zhihu.com/p/101341002
另一个明确的方向是搭配高精地图。在气象条件有限的情况下比如大雾天气,摄像头和激光雷达的感知能力都会极大受限,这个时候需要有可以配合雷达进行基础车道和交通标识识别的其他工具,高精地图是目前最佳的解决方案。通过分米甚至厘米级的地图精度,ADAS系统可以有效实现精准的车道定位。当然高精地图本身因为巨大的数据量需要有5G网络的加持,这也是为什么我一直认为自动驾驶和车联网/物联网一样,都需要5G技术 的支持,同理5G基础设施的完善反过来会对自动驾驶的实现起到极大的推动作用。
 图片来自: https://zhuanlan.zhihu.com/p/99886859
图片来自: https://zhuanlan.zhihu.com/p/99886859
回到车企端,广州车展上小鹏发布了下一代智能平台,也是围绕着这几个方向部署了新产品,包括我第一次见到在量产车上使用基于激光雷达的32个传感器自动驾驶系统,以及基于5G的高精地图定位功能。


聊完了功能安全部分的前景,再看在ADAS平台算力和能耗控制上的未来展望。目前各个大厂在做的量产方案都是融合了多核CPU和GPU的SoC芯片系统方案,在满足上文提到的自动驾驶算力需求的同时相对工控机大幅降低能耗。2019年特斯拉开始量产以自研 FSD 芯片为核心的 Hardware3.0 硬件,算力达到 144Tops(1TOPS代表处理器每秒钟可进行一万亿次(10^12)操作)。据报道,预计于2021年底特斯拉还将量产 下一代Hardware4.0 ,算力将是上一代的3倍(https://electrek.co/2020/08/18/tesla-hw-4-0-self-driving-chip-tsmc-for-mass-production-q4-2021-report/amp/)。Nvidia规划的下一代自动驾驶芯片系统,甚至通过多个芯片组合将达到2000Tops的算力,在满足L5等级自动驾驶算力需求的同时功耗只有800W。

 图片来自:https://zhuanlan.zhihu.com/p/141403316
图片来自:https://zhuanlan.zhihu.com/p/141403316
同样在国内,小鹏作为主打智能的新能源品牌,在广州车展发布的下一代自动驾驶算法平台从上一代Xavier 30Tops的算力进化为508Tops的集成化芯片系统,实现了十倍以上的算力提升,用来满足包括激光雷达在内的32个ADAS传感器融合,同时能耗只有100W左右。这种算力提升的另一大好处就是可以将以往分散的感知,规划以及动作执行软件都继承在单一的XCU上,通过减少控制器数目以及控制器之间的通讯线束来降低成本,由此在实现下一代辅助或者自动驾驶功能的同时不会大幅增加整车成本。


那么下一代智能汽车究竟会是什么样的?更强大的辅助甚至自动驾驶将是最大的一个可以期待的特质。而要满足这个特质,我们正在进行一系列技术突破,包括激光雷达在内的多传感器融合,基于5G的高精地图使用,以及具有超高集成度,超高算力,低能耗的ADAS控制系统。在汽车研发领域我们已经硬件先行,软件算法包括5G基础设施跟上之后通过OTA软件隔空推送,低阶的L2辅助驾驶到L3高阶辅助甚至L4-L5的自动驾驶,会比你想象中来得快。

